A Guide for Testers of GPS Devices and Systems
Technical & Application Notes
What is the Global Positioning System (GPS)?
To understand how to test gps devices, it is first important to understand a little background about the satellite technology itself. GPSGlobal Positioning System is a navigation satellite system. See also is a satellite-based radio navigation system developed and operated by the U.S. Department of Defense (DOD). GPS consists of three segments: space, control, and user.
The Space Segment consists of a minimum of 24 operational satellites in six circular orbits 20,200 km (10,900 NM) above the earth at an inclination angle of 55 degrees with a 12 hour period. The satellites are spaced in orbit so that at any time a minimum of six satellites will be in view to users anywhere in the world. These solar powered satellites continuously broadcast position and time data. There are currently 32 satellites to allow maintenance and repairs to be done while still maintaining the minimum 24 satellites in orbit.
The Control Segment consists of a master control station, with five monitor stations and three ground antennas located throughout the world. The monitor stations track all GPS satellites in view and collect ranging information from the satellite broadcasts. The monitor stations send the information they collect from each of the satellites back to the master control station, which computes extremely precise satellite orbits. The information is then formatted into updated navigation messages for each satellite. The updated information is transmitted to each satellite via the ground antennas, which also transmit and receive satellite control and monitoring signals.
The User Segment consists of the receivers, processors and antennas that allow land, sea, or airborne operators to receive the GPS satellite broadcasts and compute their precise position, velocity and time.
The GPS concept of operation is based upon satellite ranging. Users figure their position on the earth by measuring their distance from the group of satellites in space. The satellites act as precise reference points.
Each GPS satellite transmits an accurate position and time signal. The user’s receiver measures the time delay for the signal to reach the receiver, which is the direct measure of the apparent range to the satellite. Measurements collected simultaneously from four satellites are processed to solve for the three dimensions of position, velocity and time.
The GPS L1 Signal
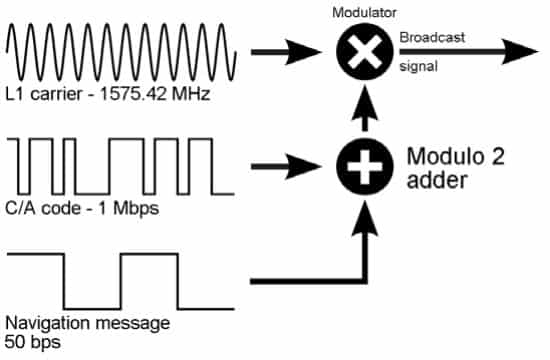
The GPS L1 signal consists of three parts: the carrier frequency, the ranging code, and the navigation message.
The ranging code and navigation message are modulated onto the carrier frequency. The carrier frequency for L1 is 1575.42MHz.
The ranging code and navigation message are modulated onto the carrier frequency. The carrier frequency for L1 is 1575.42MHz.
There are two ranging codes: C/A (course/acquisition) code and P (precision) code. The P-code has been encrypted and modulated for military/government use and transmitted as the P(Y)-code. The C/A code is a 1023 bit pseudorandom noise (PRN) sequence that identifies the satellite. It is transmitted at a rate of 1.023 Mbps so the signal repeats every millisecond. The receiver recognizes the satellite by its PRN code.
The navigation message is 1500 bits, which is divided into five subframes. Each subframe contains 300 bits and is transmitted at 50bps. It takes 6 seconds for each subframe to be transmitted, and 30 seconds for the entire message.
| Subframes | Words | Description |
|---|---|---|
| 1 | 1-2 | TLM and GPS TimeGPS Time (GPST) is an ongoing time scale, set by the GPS Control segment based on atomic clocks which are onboard satellites and present at Monitor Stations. |
| 1 | 3-10 | GPS date and satellite correction, health |
| 2-3 | 1-2 | TLM and GPS Time |
| 2-3 | 3-10 | Ephemeris Data |
| 4-5 | 1-2 | TLM and GPS Time |
| 4-5 | 3-10 | Almanac |
Almanac and Ephemeris Data
Almanac and Ephemeris Data The almanac contains orbit and status information for every satellite. It also contains an ionospheric model, and leap second information. 1/25 of the almanac data is transmitted in subframes 4-5 of the navigation message so it takes 25 total frames for the complete almanac to be received (12.5 minutes). Each satellite transmits the entire almanac and the received almanac data is considered valid for 180 days.
The ephemeris is orbital information for each satellite. Each satellite transmits only its own ephemeris data. The received ephemeris data is only considered valid by a receiver for about 4 hours. The data must be up to date to minimize error that results from minor variations in a satellites orbit.
GPS Receiver Operation
GPS receivers use triangulation to obtain a 3D fix. To make the calculation, the receiver must know the position of at least four satellites and the distance between itself and each satellite.
In addition to calculating the position, the GPS receiver will use the receive signal to calculate its own inaccuracy and reset itself to match the GPS time. This is how receivers can get away with using cheaper quartz oscillators, rather than the much more expensive atomic clocks that the satellites have. The receiver is constantly adjusting to allow its time to match the GPS satellites time, making the calculated distances very accurate.
Because the GPS receiver will download and store the entire almanac and ephemeris data, the receiver can obtain a fix very quickly when reset. There are three types of resets for a GPS receiver that will affect its TTFF (time to first fix):
| Almanac | Ephemeris | Position/Time | TTFF | |
|---|---|---|---|---|
| Cold | No | No | No | >45s |
| Warm | Yes | No | Yes | >35s |
| Hot | Yes | Yes | Yes | 1-5s |
In order for a receiver to quickly obtain a fix after a power reset, most receivers will perform either a warm or hot start. Simply resetting the power does not always perform a cold start.
Always force a ‘cold start’, or a full reset of the receiver when used with generated signals! This is an absolute must!
Without a cold start a receiver will consider the almanac and ephemeris information it previously held to be still valid. A receiver with valid data will not accept generated scenarios. It will not look for generated signals, it will use found signals assuming other ephemeris, it will fail to navigate or it will behave poorly and unpredictably.
GPS Receiver Number of Channels
The number of channels on a GPS receiver varies by type and manufacturer. The more channels the receiver has, the more satellites it can track at one time. It is important to remember that the receiver only needs four, and with the current GPS constellation there will never be more than 11-12 maximum in view at any time. Additional channels in newer receivers may also be available for Satellite Based Augmentation System (SBAS) satellites.
Sources of Error
The greatest source of error is the ionosphere. As the signal travels through the ionosphere modulation is delayed and carrier phase advanced. Even when modeled (which it must be), the error is still present and can cause a position error of up to 5 meters.
The troposphere has a smaller effect than the ionosphere but it is more difficult to model due to rapid changes. The error introduced by the troposphere is .5-1 meters.
The satellites themselves introduce error, both in the ephemeris and clock data. The DoD recently committed to four meters rms (7.8 meters, 95 percent) minimum level performance. In practice this error is about two to three meters.
GPS receivers also use a ‘Dilution of Precision’ (DOP) value to determine the quality of the GPS signal. There are several DOP values that are calculated and considered.
HDOP is the Horizontal Dilution of Precision and VDOP is the Vertical Dilution of Precision. These are a measure of how well the satellites used in the fix are positioned and how accurate the fix is. Together they make up a Positional Dilution of Precision (PDOP) calculated as:
PDOP= √((HDOP^2+ VDOP^2))
The Time Dilution of Precision (TDOP) is a measure of how the satellite geometry is affecting the ability of the GPS receiver to determine time.
The Geometric Dilution of Precision is a measure of the overall uncertainty is a GPS position solution. The GDOP value should be less than five. GDOP is calculated as:
GDOP= √((PDOP^2+ TDOP^2))
The overall position accuracy is determined by the GDOP times the measurement precision. If the measurement precision is 1m and the GDOP is 5m, the error introduced is five meters.
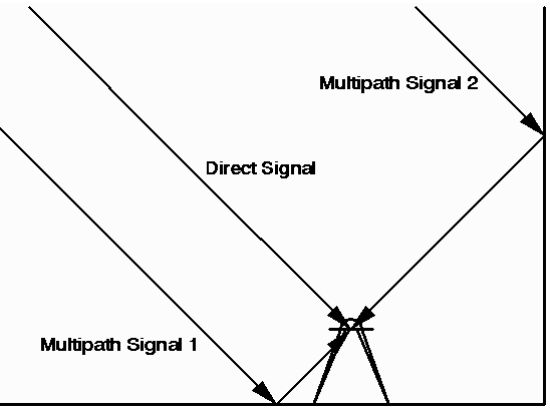
A source of error that is an extremely difficult problem to overcome is multipath. Multipath occurs when a signal bounces off objects and many of the same signals arrive at the receiver at different times. The receiver must decide which is the direct received signal and which are actually bounced signal that, if used, would cause erroneous data. There is no one solution to multipath but it is mitigated by using a combination of techniques in the receiver.
Additional GPS Signals
| Band | Freq (MHz) | Phase | Usage |
|---|---|---|---|
| L1 | 1575.42 | In-Phase (I) | Encrypted P(Y) code |
| L1 | 1575.42 | Quad-Phase (Q) | C/A, L1 Civilian, and Military M-Code |
| L2 | 1227.60 | In-Phase (I) | Encrypted P(Y) code |
| L2 | 1227.60 | Quad-Phase (Q) | L2 Civilian, and Military M-Code |
| L3 | 1381.05 | Signals nuclear detonations/High-energy infrared events. | |
| L4 | 1379.913 | Being studied for additional ionospheric correction | |
| L5 | 1176.45 | In-Phase (I) | Safety-of-Life (SoL) Data Signal |
| L5 | 1176.45 | Quad-Phase (Q) | Safety-of-Life (SoL) Pilot Signal |
Systems that Aid GPS
There are several systems or methods that have been deployed to aid in making the GPS system more accurate.
Assisted GPS (A-GPS) consists of a server in conjunction with the GPS receiver. The server will supply the navigation data and approximate time and position in order to speed up the time to acquire a fix. A-GPS is used extensively in mobile phones, and can be used to improve sensitivity indoors.
Differential GPS (DGPS) uses 2 receivers. One receiver is located at an accurately surveyed point and is referred to as the “base station”. A correction is calculated by comparing the known location to the location determined by the GPS satellites. The correction is then applied to the other receivers (known as the rover) calculated position.
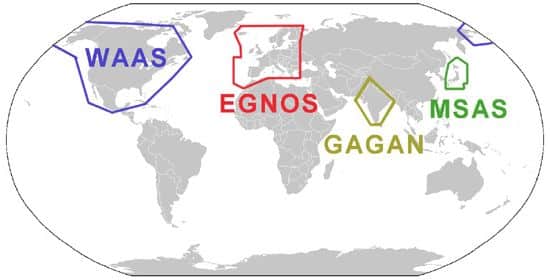
Satellite Based Augmentation System (SBAS) is a term given to systems that augment GPS. EGNOS in Europe, WAAS in North America, MSAS in Japan and GAGAN in India are all SBAS, though their implementations and designs vary. Through the use of satellites and ground stations, these systems calculate and generate correction messages to be broadcast by the satellites and received by SBAS enabled receivers for more accurate positioning information. These augmentation satellites also have PRN numbers but they are higher than the 1-32 the GPS satellites are assigned.
Other GNSS Systems
GLONASS – a second world-wide GNSSGlobal navigation satellite system (GNSS): A general term describing any satellite constellation that provides positioning, navigation, and timing (PNT) services on a global or regional basis. See also system. Today there are 20 operational satellites operating at 1602.0 MHz
Beidou – a system in development by the Chinese. Nine satellites, will eventually be 35 by 2020.
Galileo – Fully operational in 2019, with a total of 30 satellites.
India, France and Japan are also in the process of developing regional navigation and augmentation systems.